3.0 KiB
| layout | title | description | date | categories | redirect_from | ||
|---|---|---|---|---|---|---|---|
| post | Interpolating motor control commands from Dart data | And other weird things to do with XY datasets | 2020-01-14 20:13:00 | frc data |
|
At some FRC events, ZEBRA Technologies places dart trackers for their MotionWorks system on robots. They then provide real-time motion tracking data for all bots on the field. I got my hands on a few data archives from various events in 2019 that used the darts. Here is a little post about what I have been able to do with this data.
The data
For this post, I will be working with data from Chezy Champs 2019. I recived the tracking data in the following CSV format:
X position (Feet), Y position (Feet), UNIX epoch time (UTC)
Data analysis
I wrote a little parser that converts the CSV data to pose data. A pose is a vector containing the following field-absolute components:
struct Pose {
double x;
double y;
double theta;
}
While we are at it, Ill define a "Transpose", which is like a pose, but relative to other poses, and a "ChassisSpeed" vector:
struct ChassisSpeed {
double left;
double right;
}
class Transpose {
private:
double x;
double y;
double theta;
public:
ChassisSpeed fromTranspose();
}
Converting a difference to a Transpose
The only data we can directly read from the Dart data is poses over time (all poses have an angle of 0 degrees). To convert these to Transposes, we need to do a little math. Basically, we can take two poses, then calculate their differences:
# Find the differences in coords
dx: float = now.x - last.x
dy: float = now.y - last.y
# Calculate a heading from translation
theta: float = atan2(dx, dy)
Now, with this data, we can build a Transpose out of any pair of data points.
Converting a transpose to a ChassisSpeed
To be completely honest, I originally had no idea what I was going to use this data for, but ended up deciding to try to reconstruct motor data from the position data. This is just a form of Inverse Kinematics.
To do this, all we need is a little math:
ChassisSpeed fromTranspose(){
double delta = TRACK_WIDTH * this.theta / 2 * 1.0469745223;
return (new ChassisSpeed(this.x - deltaV, this.x + deltaV);
}
This will calculate the heading difference between 0,0 and the transpose, then apply that to the X vector as a wheel velocity. TRACK_WIDTH is the width of the robot drivebase in inches (I used 25.4 because that is team 254's track width)
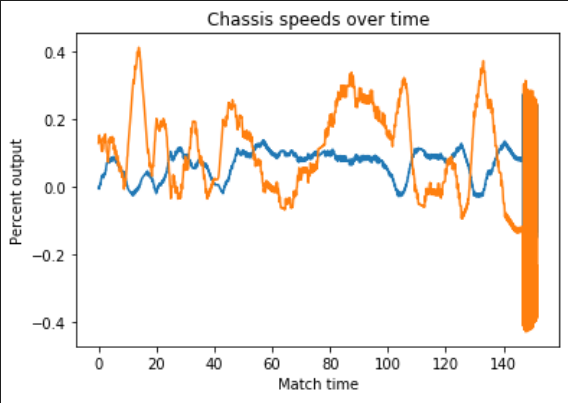
Chassis speeds over time
Here is a little graph of the calculated chassis speeds over time. (Keeping in mind that inaccuracies in the Dart system cause some "drift")